The Quadcopter

1) Function/Use
First, this drone was built just for the pleasure to built it but it have been build also in order to make movies shot from a higher point of view than a human can do. It was supposed to serve to a future terminal project for filming building and recreate it on a 3D software.
2)components:
- Lithium batterie 3000mAh (269g )
- A distribution board for the electricity
- 4 ECS (Electronic Stability Control)
- control board
- Wave receiver 2.4GHz
- A remote control 2.4GHz
- 4 engines 1100KV Brushless, 1130g of thrust
- 4 propellers
3) The quadcopter technology
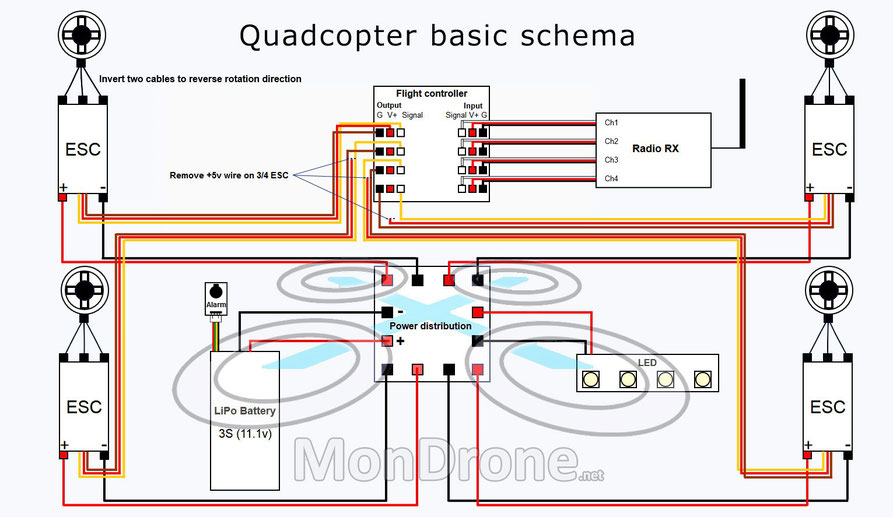
My quadcopter have a Turnigy 3000mAh lithium battery who distribute it by the Power Distribution Board to the four ECS (Electronic Stability Control). The ESC convert the energy in three-phase for the four 1100KV Brushless out runner Motors, this increases their efficiency. The ECS convert the power also for the wave receiver ,who receive all the information of the remote controller 2.4Ghz and the Flight Controller CC3D (Processor) which treat the information with the program configuration Within it. The four propellers on the quadcopter make it fly when the motors turns at high speed.
4) Power supply

The battery needs to be recharged thanks to the Lipo charger over it, it allows to charge equally every cells of the battery. With a charge of 1 hour the autonomy is equal to 15 minutes.
5) Vocabular
|
ECS(Electronic Stability Control)
|
Contrôle de stabilitée electronique |
|
Wave receiver |
Récepteur d'ondes |
|
Engines |
moteurs |
|
Propellers |
hélices |
|
Brushless out runner motor |
"moteur sans balais" ou machine synchrone auto-pilotée à aimants permanents |
|
Quadcopter |
Quadricopter (drone a 4 propulsion) |
|
Kv (=RPM/volt) |
Tour par minute par volt |